#include <ivfctl/IvfSlerpController.h>
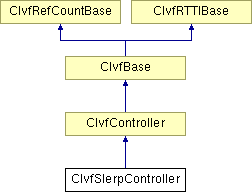
Inheritance diagram for CIvfSlerpController:
Public Types | |
| enum | TEndAction { EA_STOP, EA_REVERSE, EA_RESET, EA_DEACTIVATE } |
| enum | TStartAction { SA_STOP, SA_REVERSE, SA_RESET, SA_DEACTIVATE } |
Public Member Functions | |
| CIvfSlerpController () | |
| virtual | ~CIvfSlerpController () |
| void | setSlerp (CIvfSlerp *slerp) |
| CIvfSlerp * | getSlerp () |
| void | setInitialPos (double value) |
| void | setInitialSpeed (double value) |
| void | setStartActionType (TStartAction action) |
| void | setEndActionType (TEndAction action) |
| virtual void | doReset () |
| virtual void | doUpdate (double dt) |
Controls the rotation of an object using the rotations given by a set of quaternions.
Definition at line 39 of file IvfSlerpController.h.
|
|
CIvfSlerpController constructor |
|
|
CIvfSlerpController destructor |
|
|
Virtual update routine This method should be overridden in derived classes to handle incremental time update
Reimplemented from CIvfController. |
|
|
Return CIvfSlerp class |
|
|
Define what to do when arriving at end position
|
|
|
Set initial position on slerp
|
|
|
Set initial speed on slerp
|
|
|
Set instance of slerp class used when interpolating |
|
|
Define what to do when returning to start position
|
 1.4.6-NO
1.4.6-NO