#include <ivf/IvfConstructionPlane.h>
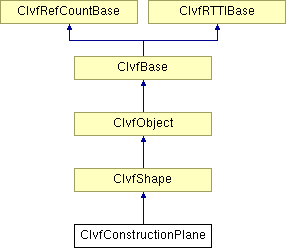
Inheritance diagram for CIvfConstructionPlane:
Public Member Functions | |
| CIvfConstructionPlane () | |
| virtual | ~CIvfConstructionPlane () |
| IvfClassInfo ("CIvfConstructionPlane", CIvfShape) | |
| void | updateCursor (int x, int y) |
| void | updateSizes () |
| void | activate () |
| void | deactivate () |
| bool | isActive () |
| void | lockCursor () |
| void | unlockCursor () |
| bool | isCursorLocked () |
| void | enableCursor () |
| void | disableCursor () |
| bool | isCursorEnabled () |
| void | setSize (double width, double height) |
| void | setCamera (CIvfCamera *camera) |
| virtual void | setPosition (const double x, const double y, const double z) |
| void | setRotationQuat (double vx, double vy, double vz, double theta) |
| void | setCursor (CIvfCursor *cursor) |
| void | setRelativeAxisSize (double size) |
| double | getRelativeAxisSize () |
| void | setRelativeCursorSize (double size) |
| double | getRelativeCursorSize () |
| void | setUpdateCursorSize (bool flag) |
| void | setUpdateAxisSize (bool flag) |
| CIvfVec3d & | getCursorPosition () |
| void | getPosition (double &x, double &y, double &z) |
| CIvfUcs3d * | getUcs () |
| void | setGridSpacing (double spacing) |
| virtual void | updateBoundingSphere () |
| CIvfGrid * | getGrid () |
| double | getDepth () |
| double | getWidth () |
Protected Member Functions | |
| virtual void | createGeometry () |
This class implements a visual coordinate system plane, with a cursor and a grid. The cursor is allways aligned with the defined coordinate system and can also be snapped to a specified grid.
Definition at line 47 of file IvfConstructionPlane.h.
|
|
CIvfConstructionPlane constructor |
|
|
CIvfConstructionPlane destructor |
|
|
Sets the construction plane in an active state In the active state the grid spacing, cursor and axis are visible. |
|
|
Forces an object recalculation. Reimplemented from CIvfShape. |
|
|
Sets the construction plane in an inactive state In the active state the grid spacing, cursor and axis are invisible. |
|
|
Returns the current cursor position in global coordinates |
|
||||||||||||||||
|
Returns position of construction plane Reimplemented from CIvfShape. |
|
|
Return relative axis size |
|
|
Return relative cursor size |
|
|
Returns used defined coordinates system |
|
|
Queries active state |
|
|
Queries cursor lock state |
|
|
Locks cursor This method locks cursor movement in the local XZ plane. Enables movement in the local Y direction. |
|
|
Sets the current camera (required) The camera is used to map the x/y mouse coordinates to the coordinates on the construction plane. |
|
|
Set cursor used |
|
|
Sets grid spacing |
|
||||||||||||||||
|
Set position of construction plane Sets the position of the construction plane and the local coordinate system used when calculating 3d coordinates. Reimplemented from CIvfShape. |
|
|
Set relative axis size
|
|
|
Set relative cursor size
|
|
||||||||||||||||||||
|
Set rotation of construction plane Sets the rotation of the construction plane and the local coordinate system used when calculating 3d coordinates. Reimplemented from CIvfShape. |
|
||||||||||||
|
Set size of construction plane in the XZ plane |
|
|
Update cursor flag
|
|
|
Update cursor flag
|
|
|
Unlocks cursor Movement in the XZ plane is enabled. Movement in the local Y direction is disabled. |
|
|
Updates bounding sphere for construction plane Reimplemented from CIvfObject. |
|
||||||||||||
|
Updates 3D cursor position This routine maps the 2D mouse coordinates to 3d coordinates used with the 3D cursor. The routine should be called in response to mouse move events.
|
|
|
Updates sizes of axis and cursor objects To be able to allways see the cursor and axis objects, the sizes can be automatically updated relative to the distance to the camera. This method should be called whenever the camera is moved. |
 1.4.6-NO
1.4.6-NO